
【优博微展】博士学位论文是博士生理论水平、科研能力的集中体现,是评价博士生培养质量的核心指标。“优博微展”专栏将聚焦优秀博士深耕成果,展现能动学子钻研风采,旨在形成“见贤思齐”的榜样力量,为在校研究生提供学习参考,激励广大师生勇攀学术高峰!
近日,在中国汽车工程学会2025年度“博士学位论文激励计划”的评选中,我院张自宇博士的学位论文“考虑驾驶员紧急接管特性的人机力与位移协同转向控制研究”成功入选,论文指导教师为赵万忠教授、王春燕教授。本次入选,是学校、学院首次斩获该学会优秀博士学位论文正式奖。

中国汽车工程学会(China SAE)成立于1963年,是由中国汽车科技工作者自愿组成的全国性、学术性法人团体,与美国SAE、日本SAE并称为世界三大汽车科技社团。中国汽车工程学会博士学位论文激励计划旨在推动汽车产业科技进步,鼓励创新性研究,激励汽车及相关交叉领域的博士研究生潜心钻研,务实创新,解决汽车产业发展面临的理论问题和技术问题,在行业内具有极高的含金量和认可度。此次全国共征集到214篇论文,经过专家函评、一轮会评、二轮会评(终评答辩)3个环节,最终共有9篇论文正式入选,其余获奖单位均为985高校。
获奖博士学位论文介绍
论文题目:考虑驾驶员紧急接管特性的人机力与位移协同转向控制研究
论文作者:张自宇
指导教师:赵万忠教授、王春燕教授
学科专业:机械工程
研究背景
智能汽车是未来交通战略发展方向,在减少交通事故、提高安全性等方面具有显著优势。随着自动驾驶技术的不断提升,L3级智能汽车逐步进入量产阶段。然而,L3阶段智能汽车难以处理所有工况,在特定紧急情况下仍需驾驶员接管控制。接管期间人机共享车辆转向控制,但因驾驶员转向状态动态恢复的强时变特性,人机协同转向接管过程面临安全稳定性差、转向冲突频发等问题,现已成为制约我国智能汽车产业发展的核心难题。因此,亟需面向紧急接管场景开展人机协同转向控制研究,以提升L3级智能汽车安全稳定性,助力我国汽车产业高质量发展。
主要研究内容
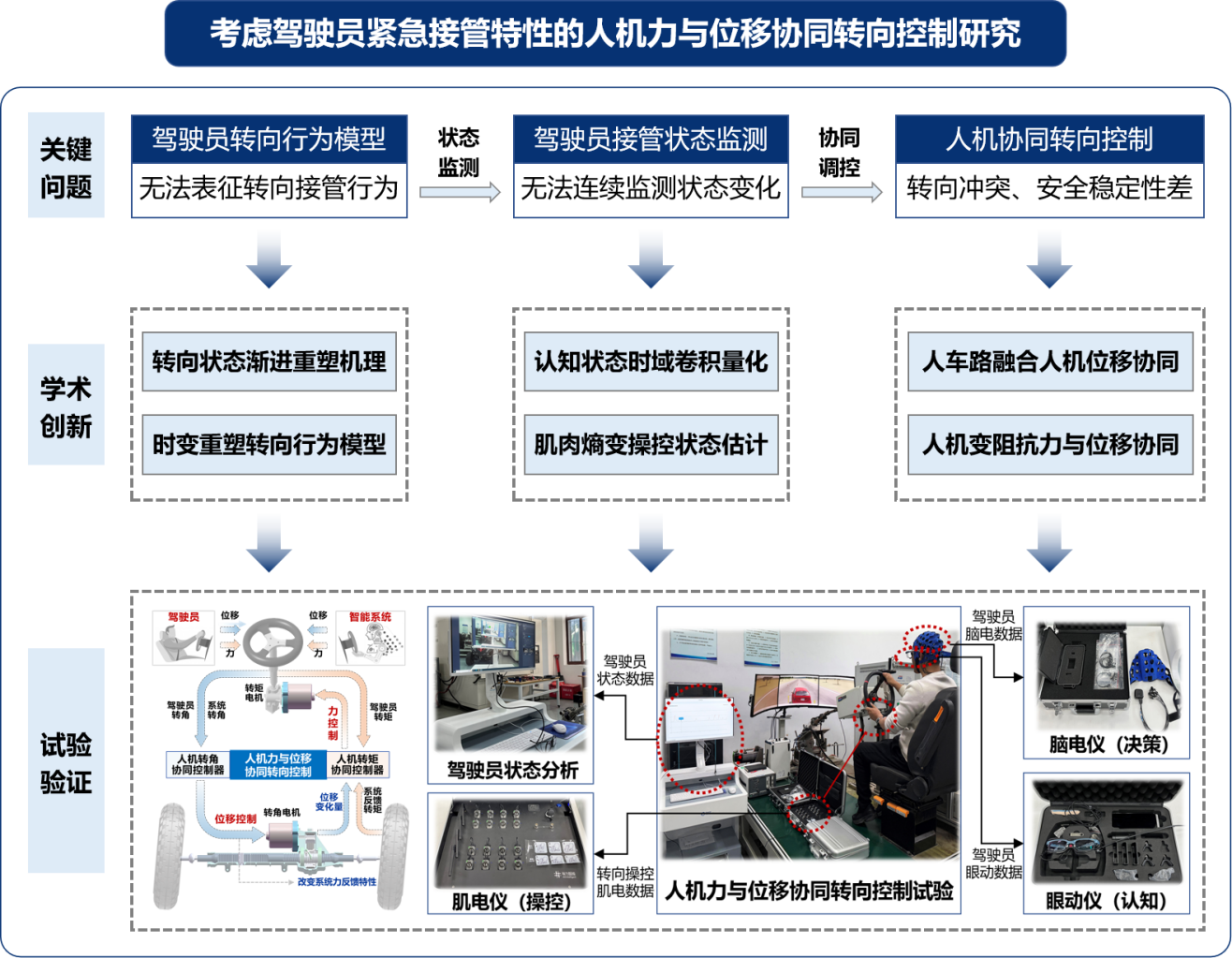
面向L3级智能汽车紧急接管过程中存在的车辆安全稳定性差、人机转向冲突频发等关键问题,聚焦L3级人机共驾紧急接管场景,以线控转向系统为人机交互媒介,考虑驾驶员接管特性开展人机力与位移协同转向控制研究,通过对驾驶员不同场景下的紧急接管行为分析,构建了可反映驾驶员时变认知、决策及操控状态渐进时变重塑特性的时变转向行为模型,模型精度达到了88%以上,从接管过程驾驶员视觉及肌肉特性时变规律及其与驾驶员认知操控状态关联性出发,构建了非侵入、定量化、实时化及连续性的驾驶员紧急接管时变状态量化估计方法,结合紧急接管场景下的实时性、环境适应性及人车路闭环系统安全稳定性需求,提出了融合人车路状态的人机转角优化协同控制方法,有效抑制了人机冲突,显著提升了车辆接管安全稳定性,探索了系统力与位移耦合控制架构下驾驶员力与位移操控特性的变化规律,构建了融合变虚拟阻抗控制架构的人机力与位移协同转向控制方法,通过自适应对齐人机阻抗特性变化,实现了对人机力与位移特性的高效协同控制,有效降低了系统力特性波动,稳态接管时间降至5s以内,实现了驾驶员快速稳定接管车辆转向控制。
主要创新点
(1)揭示了驾驶员紧急接管认知决策及操控状态渐进重塑机理,建立了驾驶员转向状态时序串并行重塑的时变转向行为模型,实现了对紧急接管场景驾驶员时变转向行为建模;
(2)揭示了驾驶员视觉-认知、肌肉-操控状态映射机理,提出了驾驶员时域联合卷积认知状态估计及基于状态熵的操控状态估计方法,实现了对驾驶员接管状态连续精准监测;
(3)构建了融合驾驶员接管状态及车路风险状态的动态权空间,提出了动态权空间优化的人机转角协同控制策略,有效抑制人机转向冲突,显著提升了车辆接管安全稳定性;
(4)提出了人机变虚拟阻抗力与位移协同转向控制策略,实现了人机力与位移特性间的高效协同控制,有效提升了驾驶员接管操控稳定性,实现了快速稳定接管。
获奖人风采

作者简介:张自宇,南京航空航天大学能源与动力学院2024届博士毕业生,现为南京航空航天大学能源与动力学院博士后。累计发表SCI论文23篇,第一作者论文14篇(Nature子刊1篇,中科院一区8篇),第一发明人授权发明专利24件,国际PCT专利2件,入选江苏省高价值专利组合,制定团体标准3项,获得软件著作8项;成果在奇瑞、比亚迪等主流车企得到应用,获中国发明协会创业奖创新奖一等奖1项(排6)、中国国际“互联网+”大学生创新创业大赛全国金奖2项(排1、排2)、获评南京航空航天大学十大杰出青年学生。主持国家自然科学基金青年基金、江苏省青年基金等项目6项,主持奇瑞、徐工等国内主流车企技术开发项目3项。
